Why normalization is needed
Deep transformers stack dozens to hundreds of residual blocks. Without normalization, signal statistics (mean/variance/scale) drift layer by layer—making gradients chaotic and learning rate tuning a nightmare.
Classic explanation: reduce “internal covariate shift” (distribution drift between layers). Modern practical view: keep feature scales bounded so residual paths remain numerically sane, enabling:
- Stable gradient propagation (avoid exploding/vanishing)
- Higher usable learning rates (especially with AdamW + warmup)
- Reduced sensitivity to weight init
- Cleaner residual “identity highways” in pre-norm architectures
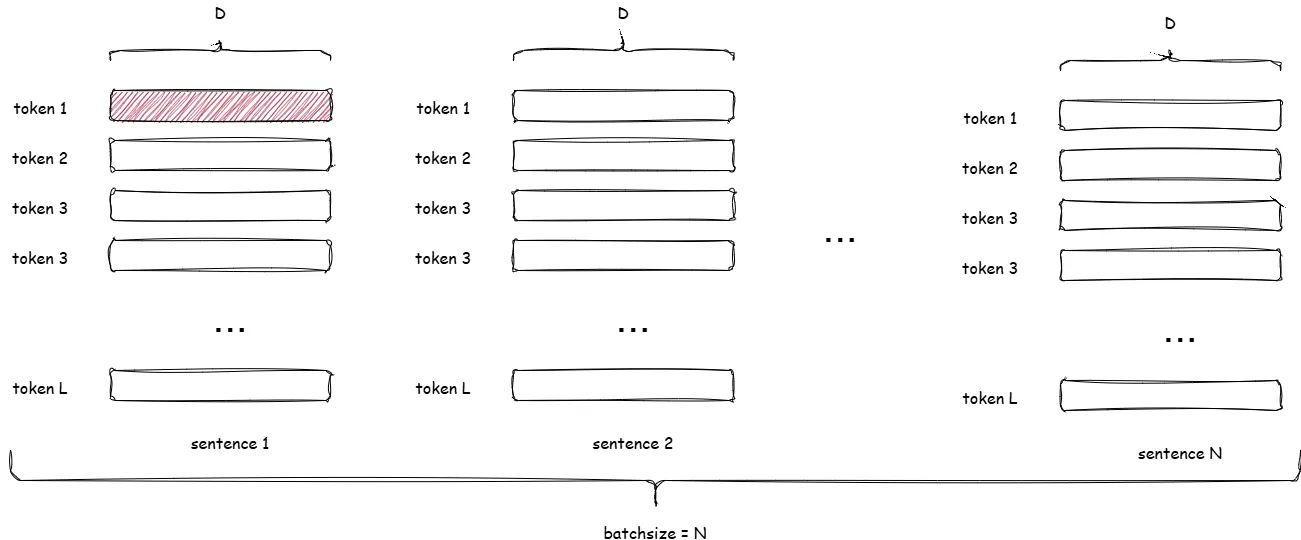
Think of normalization as inserting a cheap re-centering/re-scaling checkpoint that bounds error amplification. In transformers we normalize per-token over hidden dimension, NOT across batch, so inference is invariant to batch size.
LayerNorm & RMSNorm
In transformer-style LLMs the two players are LayerNorm (canonical) and RMSNorm (leaner). Both operate per token vector (last dimension only). No batch coupling.
LayerNorm
Let input tensor shape be = (batch, sequence length, hidden size). LayerNorm acts independently on each token vector of length .
For token at batch index , position , denote its vector . Compute:
Then
Affine restore step (learnable scale/shift per feature):
Why keep ? Normalization scrubs amplitude & offset; these params let the model reintroduce optimal feature scaling for downstream layers. Without them capacity collapses subtly.
Operational notes:
- Independent of batch size and sequence length.
- Stable under mixed precision; (often 1e-5 or 1e-6) guards underflow.
- Cost: mean + variance reduction + two passes; slightly heavier than RMSNorm.
RMSNorm
MiniMind swaps LayerNorm for RMSNorm: drop mean centering; scale only by root-mean-square. Leaner, fewer ops, empirically fine for modern LLM residual stacks.
Definition for vector :
No shift; mean is preserved (not forced to 0).
Tradeoffs vs LayerNorm:
- Pros: Fewer reductions (no mean separate + variance), faster, less numerical churn.
- Cons: Does not center -> downstream layers must tolerate mean drift (residual pathways usually do).
- Behavior: Invariant to uniform scaling (like LayerNorm), not invariant to constant bias.
Implementation of RMSNorm in MiniMind
Straightforward module:
1class RMSNorm(torch.nn.Module):2 def __init__(self, dim: int, eps: float = 1e-5):3 super().__init__()4 self.eps = eps5 self.weight = nn.Parameter(torch.ones(dim))6
7 def _norm(self, x):8 return x * torch.rsqrt(x.pow(2).mean(-1, keepdim=True) + self.eps)9
10 def forward(self, x):11 return self.weight * self._norm(x.float()).type_as(x)Key mechanics:
- Scale factor:
rsqrt(mean(x^2) + eps). - Keeps mean; only shrinks/expands magnitude.
- Single parameter
weight(i.e. ) per feature. - Cast to float improves stability under bf16/FP16.
- Works per token: shape broadcast
(N,L,D)over last dim.
Pre-Norm vs Post-Norm
Where do we apply norm in a residual block?
Post-norm (old Transformer 2017):
1x -> Attention(x) -> + x -> LayerNorm -> outGradient must traverse the normalization that sees the sum; variance drift across deep stacks perturbs its scale factor — hazard for very deep (>24L) models.
Pre-norm (modern LLMs):
1x -> LayerNorm(x) -> Attention -> + x -> outNow backprop has an always-present identity shortcut: derivative includes a clean +1 term independent of attention internals. That stabilizes gradients; norms do not collapse/explode as depth grows.
Intuition (hack-level): keep raw residual untouched until after the heavy op; you guarantee a loss gradient highway unblocked by adaptive statistics. Empirically speeds convergence, removes the need for crazy warmup schedules, and helps with larger learning rates.
MiniMind uses pre-norm for both attention and MLP sublayers.
Implementation excerpts (trimmed):
1class MiniMindBlock(nn.Module):2 def __init__(...):3 self.input_layernorm = RMSNorm(config.hidden_size, eps=config.rms_norm_eps)4 self.post_attention_layernorm = RMSNorm(config.hidden_size, eps=config.rms_norm_eps)5
6 def forward(...):7 residual = hidden_states8 hidden_states, present_key_value = self.self_attn(9 self.input_layernorm(hidden_states), # pre-attention RMSNorm10 position_embeddings, ...11 )12 hidden_states += residual13 hidden_states = hidden_states + self.mlp(self.post_attention_layernorm(hidden_states)) # pre-MLP RMSNorm14
15class MiniMindModel(nn.Module):6 collapsed lines
16 def __init__(...):17 self.norm = RMSNorm(config.hidden_size, eps=config.rms_norm_eps)18
19 def forward(...):20 ...21 hidden_states = self.norm(hidden_states) # final RMSNormBatchNorm (side note)
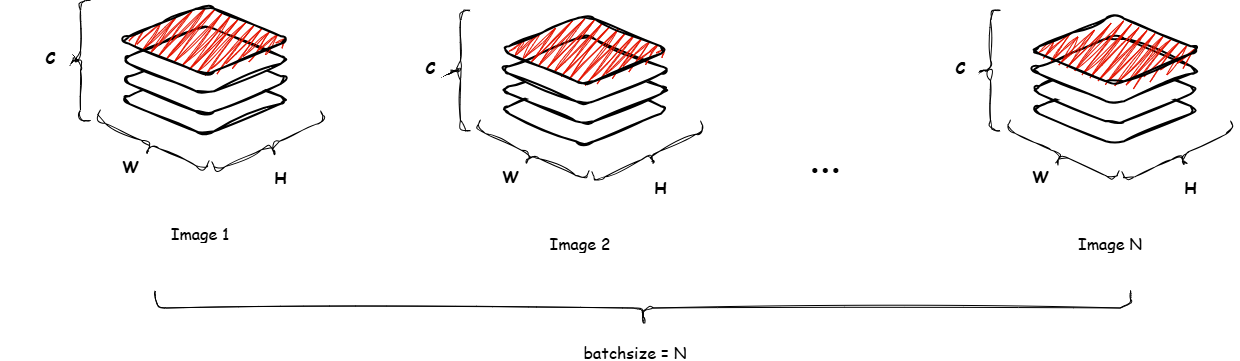
BatchNorm normalizes per-channel over the mini-batch (and spatial dims for CNNs). Rare in autoregressive LLMs because batch-size dependence breaks variable-batch inference stability and hurts long-context streaming.
Shape :
- Per-channel mean:
Per-channel variance:
- Normalize:
- Affine:
Running (EMA) stats updated during training (momentum ):
Inference uses frozen stats:
Why not in LLMs: batch-coupling + sequential generation mismatch + extra state sync for distributed training.
Summary
Key takeaways:
- LayerNorm: centers + scales per token; heavier; widely used historically.
- RMSNorm: scale-only; cheaper; works great with residual pre-norm stacks (MiniMind choice).
- Pre-norm blocks preserve an identity gradient path → deeper stable training & higher LR headroom.
- BatchNorm: powerful in vision; avoided in autoregressive transformers due to batch dependence.
Rules of thumb:
- If reproducing classic papers: LayerNorm is fine.
- If chasing speed/memory with similar convergence: pick RMSNorm.
- Go pre-norm unless you have shallow depth (<12) and legacy compatibility constraints.